六自由度平臺-PT-004-1

1:系統組成
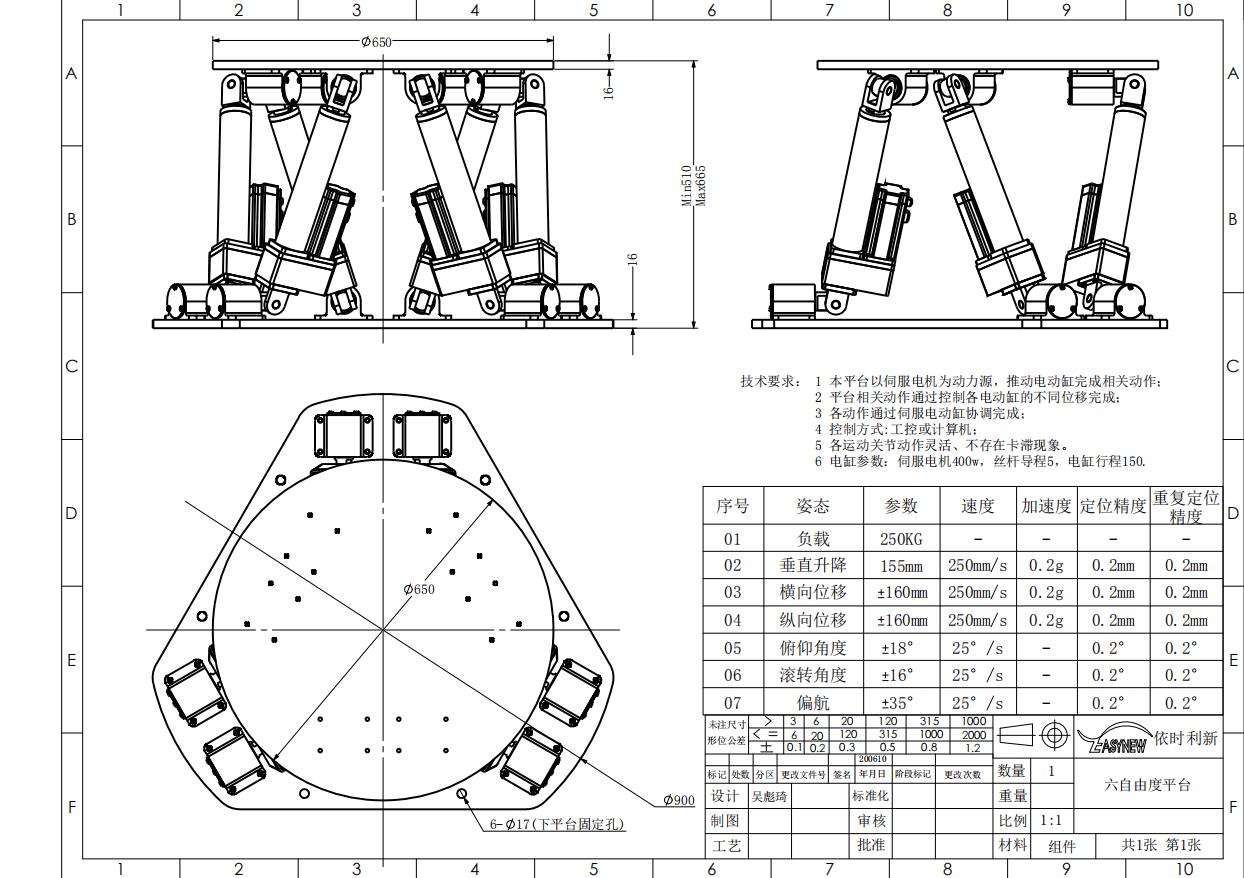
六自由度平臺系統由Stewart機構的六自由度運動平臺、計算機控制系統、驅動系統等組成。下平臺安裝在地面的固定基座基上,上平臺為支撐平臺。計算機控制系統通過協調控制電動缸的行程,實現運動平臺的六個自由度的運動,即笛卡爾坐標系內的三個平移運動和繞三個坐標軸的轉動。
各主要部分簡述如下:
1)運動平臺
上平臺:連接需要被模擬動作的機構
上鉸鏈:雙回轉軸的虎克鉸結構,用于連接上平臺與電動缸的活塞桿。
下鉸鏈:單虎克鉸結構,用于連接固定基座與電動缸的筒體。
下平臺:安裝固定基座。
2)計算機控制系統硬件
運動控制計算機(伺服控制單元):實現平臺系統啟動/停止、接收上位機發來的位姿控制信息、對電動缸進行運動控制、監控伺服電機驅動器的工作狀態、監控系統的運動狀態、完成故障處理以及安全保護工作。
信號調理單元:完成與平臺系統運動狀態相關的各種傳感器信號、測試信號和數字I/O信號的調理,以及伺服驅動器的驅動等。
3)系統控制軟件
運動控制計算機的軟件包括運動控制軟件和邏輯控制軟件。
2:系統工作原理
平臺的工作原理如圖2.1所示。控制系統為分層控制結構,監控單元負責人機界面交互,接受用戶操作指令。并將控制信號下達給實時控制計算機。圖2.1?系統原理框圖
首先,用戶輸入期望的運動參數(運動平臺位姿、速度或加速度),如X向正弦運動。該運動參數傳輸給運動控制計算機,運動計算機通過運動學反解計算出六個電動缸的運動參數(電動缸位移量);然后,運動計算機根據六支電動缸運動參數和六個電動缸的位移反饋量,驅動六個伺服驅動器,實現六個電動缸閉環位置控制,使六個電動缸達到所要求的位移量,那么運動平臺也就達到了所期望的運動姿態。六自由度運動平臺,由于有極為廣闊的應用前景,六自由度運動平臺是由六支油缸,上、下各六只萬向鉸鏈和上、下兩個平臺組成,下平臺固定在基礎上,借助六只油缸的伸縮運動,完成上平臺在空間六個自由度(X,Y,Z,α,β,γ)的運動,從而可以模擬出各種空間運動姿態,可廣泛應用到各種訓練模擬器如飛行模擬器、艦艇模擬器、海軍直升機起降模擬平臺、坦克模擬器、汽車駕駛模擬器、火車駕駛模擬器、地震模擬器以及動感電影、娛樂設備等領域,甚至可用到空間宇宙飛船的對接,空中加油機的加油對接中。在加工業可制成六軸聯動機床、靈巧機器人等。由于六自由度運動平臺的研制,涉及機械、液壓、電氣、控制、計算機、傳感器,空間運動數學模型、實時信號傳輸處理、圖形顯示、動態仿真等等一系列高科技領域,因而六自由度運動平臺的研制變成了高等院校、研究院所在液壓和控制領域水平的標志性象征。
售后說明及建議
1.本產品自出廠出貨日起,在正常使用情形下(即非人為損壞)保修一年。
2.若因人為因素或其它不正常使用所造成之損壞,慨不在保修范圍內。
3.本產品出廠后嚴禁自行拆卸,一經拆卸慨不負保修責任。
視頻: 六自由度動感汽車模擬器客戶體驗
視頻: 依時利新科技六自由度電動缸效果案例
視頻: 依時利新科技私服電動缸實拍
視頻: 六自由度平臺電動缸效果實拍
視頻: 電動缸壓力測試5T